

Az EPSON C12-B 6-tengelyes robot max. 12 kg teher mozgatására képes és 1400 mm-es karhosszal rendelezik.
A C12-es robot az EPSON által kifejlesztett, forradalmian új QMEMS érzékelőt használja, ami drasztikusan csökkenti a mozgásokból adódó rezgéseket, növelve a pontosságot és optimalizálva a teljesítményt.







Az Epson GX-sorozatú SCARA robotjai, valamint a CB-sorozatú 6-tengelyes robotok Epson GYROPLUS szenzort tartalmaznak. Ez a forradalmi szenzor a robotkar végén méri a kar rezgését és szögsebességeit. A vezérlő ez alapján visszaszabályoz, csökkentve a kar rezgéseit, ami precízebb mozgásokat eredeményez.
| Modell | C12-B1401 ** | |||
|---|---|---|---|---|
| Robot típusa | 6-koordinátás robot | |||
| Különlegesség | Elem nélüli motorokkal GyroPlus szenzorral |
|||
| Terhelés | névleges. (kg) | 3 | ||
| max. (kg) | 12 | |||
| Vízszintes karhossz | (mm) | P-P: 1400,6 mm max. 1480,6 mm |
||
| Ism. pontosság | (mm) | ± 0.05 | ||
| Mozgás határok | J1 | ± 240˚ | ||
| J2 | -135˚ / +55˚ | |||
| J3 | -61˚ / +202˚ | |||
| J4 | ± 200˚ | |||
| J5 | ± 135˚ | |||
| J6 | ± 360˚ | |||
| Max. sebességek | J1 | 200 ˚/s | ||
| J2 | 167 ˚/s | |||
| J3 | 200 ˚/s | |||
| J4 | 300 ˚/s | |||
| J5 | 360 ˚/s | |||
| J6 | 720 ˚/s | |||
| Megeng. nyomaték | J4 | 25,00 N*m | ||
| J5 | 25,00 N*m | |||
| J6 | 9,80 N*m | |||
| Megeng. teh. nyomaték | J4 | 0,70 kg/m2 | ||
| J5 | 0,70 kg/m2 | |||
| J6 | 0,20 kg/m2 | |||
| Kábelezés | elektromos | D-Sub: 15-pin, RJ45 (Cat.5e): 8-pin, Force Sensor: 6-pin | ||
| pneumatikus | 2 x ø 6 mm | |||
| Kialakítás | Padlóra szerelt | |||
| Munkakörnyezet | sztenderd tisztaszoba (ISO4) és ESD |
|||
| Tömeg | (kg) | 63 | ||
| Robotvezérlő | lehetőségek | RC700-E robotvezérlő | ||
| táp- és jeladó kábel (m) | sztenderd: 3 m opcionális: 5m, 10m, 20m |
|||
| Brosúra | ||||
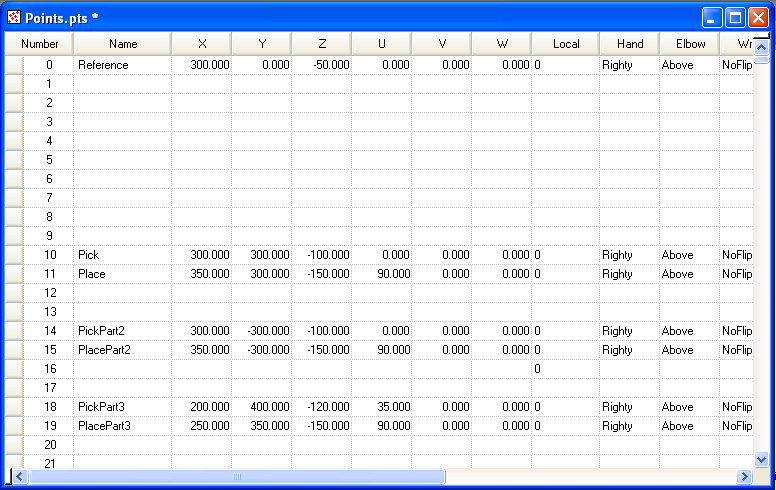
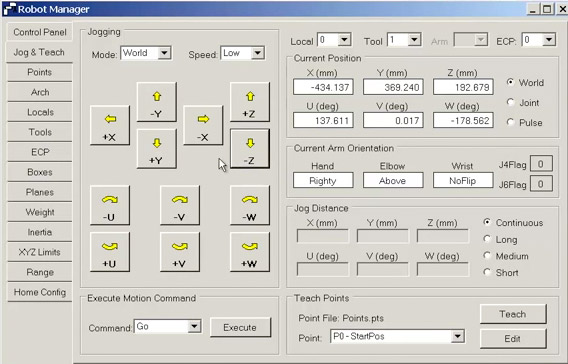
Az Epson robotok programozása az EPSON RC+ környezetben történik, ami Windows alatt telepíthető. A robotok programnyelve a SPEL+, ami legjobban a BASIC-hez hasonlít. Gyorsan tanulható, egyszerűen értelmezhető, könnyen olvasható.
A robotvezérlőink egyéb eszközökkel is képesek kommunikálni. A kommunikáció történhet digitális I/O-on keresztül vagy Fieldbus kártyákkal, akár a robottól függetlenül. Az Epson robotvezérlő, a PLC-khez hasonlóan, akár központi egységként is működhet.A SPEL+ számos mozgási lehetőséget tartalmaz: PTP (point-to-point, azaz ponttól pontig mozgás), lineáris mozgás, CP (continuous path, vagyis folyamatos mozgás), stb., vagy speciális mozgásokat mint pl. a Jump (ugrás) vagy a Pallet (palettázás).
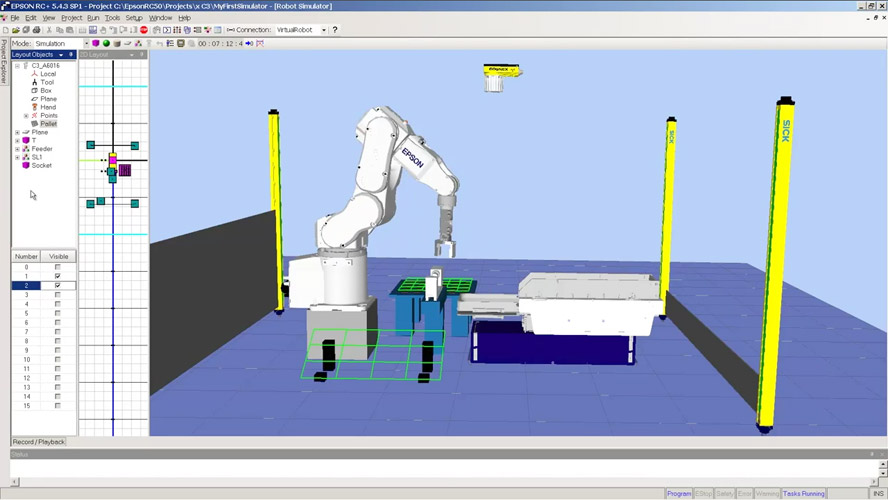
Az Epson RC+ környezet beépített szimulációs felületet tartalmaz. Ezen a felületen már a projekt kezdeti fázisban is megtervezheti a robotcelláját, megírhatja a programot. Az alkalmazás ciklusidejét még az előtt kipróbálhatja, mielőtt megérkezne a megrendelt robotja.




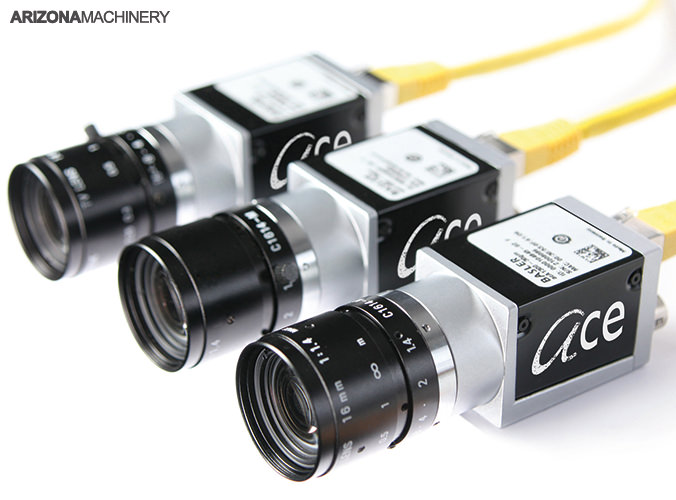
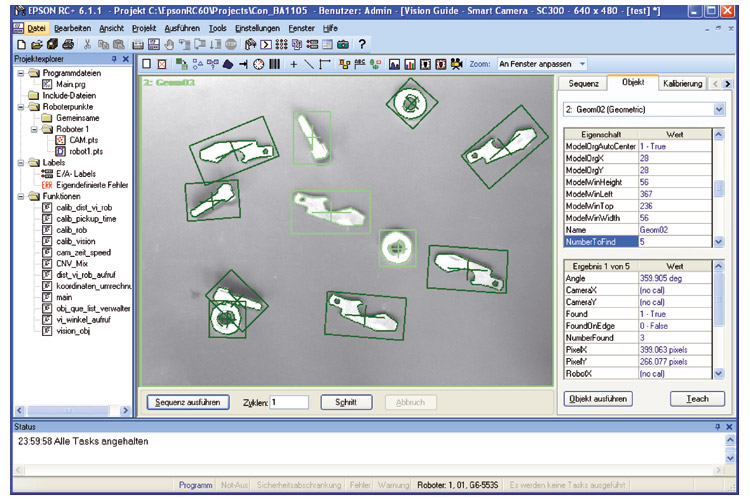
Az EPSON robotokkal szinte bármelyik gyártó kamerás rendszerét használhatja.
De az EPSON saját fejlesztésű kamerás megoldással is rendelkezik. A EPSON saját kamerás rendszerének előnye az,
hogy az kamerák az EPSON robotos környezeten belül programozhatóak (RC+). Az összes kiértékelt adat a robot
programjából azonnal elérhető.
Kétféle EPSON kamerás megoldásunk közül választhat.
Háromféle, ipari kivitelű kamerás központi feldolgozó egység közül választhat: CV2-LB, CV2-SB, CV2-HB.
A feldolgozó egység Ethernet hálózaton keresztül csatlakozik a robotvezérlőhöz. És ide csatlakozik az Ön által
kiválasztott GigE (gyorsabb) vagy USB (kedvezőbb árú) EPSON kamera is. A kamerák az EPSON RC+
környezetben programozhatóak.
Ha külső, Windows alapú ipari PC-t használ, akkor választhatja a PC Vision kamerás rendszerünket. A rendszer része a PC-be telepíthető kártya, amihez az EPSON kamerái is csatlakoznak. Ezzel a megoldással akár 8 db. nagy felbontású EPSON kamerát is használhat az alkalmazásában.
Az EPSON Vision kiegészítőkről bővebb információért kattintson ide.


Epson RC700-E robotvezérlőhöz opcionális Safety Function is rendelhető. A Safety Function két biztonsági funkciót tartalmaz: SLS és SLP. Az egyikkel a robot sebességét, a másikkal a robot pozícióját lehet korlátozni.
Az SLS külső biztonsági eszköz segítségével (pl. biztonsági szőnyeg) "érzékelheti" az ember közeledését, majd csökkentheti le a robot sebességét.
Az SLP a robot pozícióját felügyeli. Szükség esetén pedig megakadályozza, hogy a robot egy előre meghatározott területre mozogjon. Területeket, zónákat szoftveresen lehet beállítani. Külső biztonsági eszközzel (pl. fényfüggöny), ember "érzékelésekor" a robot mozgása tíltható.
Kapcsolat | Adatvédelem | Copyright © 2008 - 2025 Arizona Machinery Kft., Minden jog fenntartva.
{kind=link}