

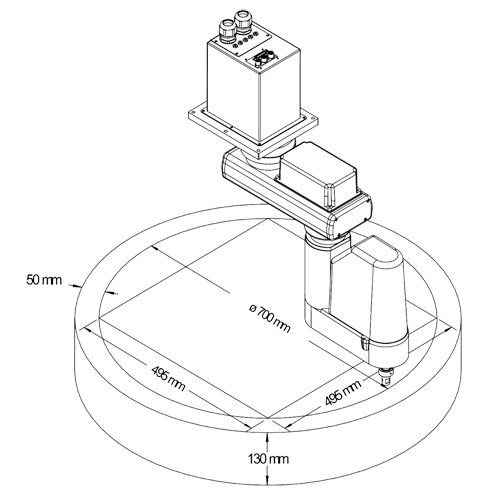
Az EPSON RS Spider robotok munkaterületében nincs "holttér". Emiatt képesek teljes mértékben lefedni a robotkar hossza által behatárolt területet, beleértve annak középső részét is. A speciális kialakításnak az előnye az, hogy az EPSON RS Spider robot képes a munkaterületén belül levő két pont között egyenes úton mozogni, anélkül, hogy a saját vázát kelljen megkerülnie. Ez a megoldás, alkalmazástól függően jelentős sebességbeli növekedést, gyorsabb ciklusidőt eredményezhet.
Mindezt az EPSON scara robotjaitól megszokott pontossággal, teljesítménnyel és akár 4 kg-os terheléssel.








| Modell | RS3-351 | RS4-551 | ||
|---|---|---|---|---|
| Robot típusa | 4 tengelyes, függesztett SCARA | |||
| Különlegesség | holttér nélküli munkaterület | |||
| Terhelés | névleges / max. (kg) | 1 / 3 | 1 / 4 | |
| Kar hossz | kar 1+2 (mm) | 350 (175+175) | 550 (275+275) | |
| Z munkahossz (mm) sztend. / tisztasz. |
130 / 100 | |||
| Max. sebesség | kar 1+2 (mm/s) | 6200 | 7400 | |
| Z-tengely (mm/s) | sztenderd: 2350 tisztaszoba: 1100 |
|||
| U-tengely (°/s) | 2600 | |||
| Ism. pontosság | kar 1+2 (mm) | ± 0.010 | ± 0.015 | |
| Z-tengely (mm) | ± 0.010 | |||
| U-tengely (°) | ± 0.010 | |||
| Megeng. teh. nyomaték | névleges / max. (kg/m2) | 0.005 / 0.05 | ||
| Z-tengely átm. | külső / belső (mm) | 16 H7 / 11 | ||
| Z-tengely berakó erő | (N) | 150 | ||
| Kábelezés | elektromos | D-Sub: 15-pin | ||
| pneumatikus | 1 x ø 4 / 2 x ø 6 | |||
| Kialakítás | Plafonra szerelt | |||
| Munkakörnyezet | sztenderd tisztaszoba (ISO3) és ESD |
|||
| Telepítési furatok | 4 x ø 6,5 mm furat 190 x 160 mm |
|||
| Tömeg | (kg) | 17 | 20 | |
| Robotvezérlő | lehetőségek | RC700-A robotvezérlő | ||
| táp- és jeladó kábel (m) | sztenderd: 3 m opcionális: 5m, 10m, 20m |
|||
| Egyéb opciók | tool adapter belső kábel elvezető egység |
|||
| Sztenderdek | RoHS Directive: 2002/92/EC ANSI/RIA R15.06-1999 NFPA 79 (2007 Edition) CSA/CAN Z434-03 (February 2003) EC Machinery Directive 2006/42/EC |
|||
| Brosúra | ||||
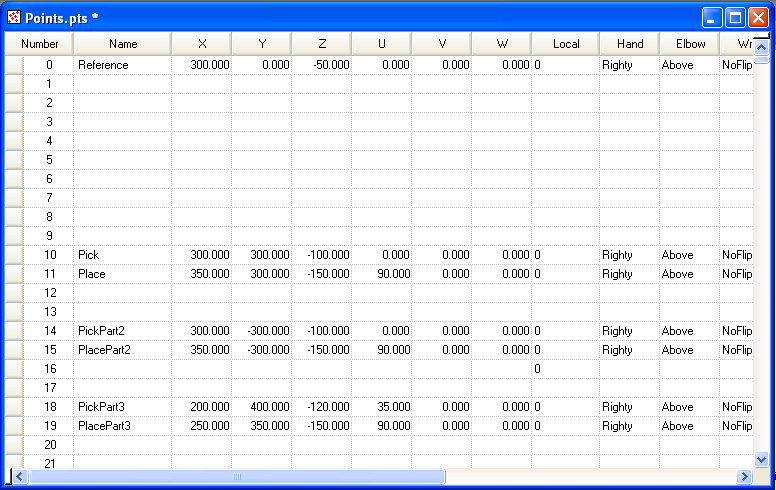
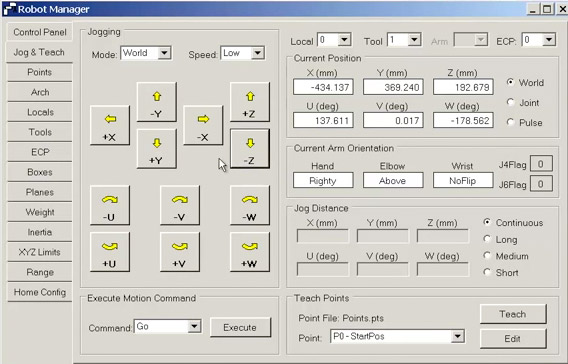
Az Epson robotok programozása az EPSON RC+ környezetben történik, ami Windows alatt telepíthető. A robotok programnyelve a SPEL+, ami legjobban a BASIC-hez hasonlít. Gyorsan tanulható, egyszerűen értelmezhető, könnyen olvasható.
A robotvezérlőink egyéb eszközökkel is képesek kommunikálni. A kommunikáció történhet digitális I/O-on keresztül vagy Fieldbus kártyákkal, akár a robottól függetlenül. Az Epson robotvezérlő, a PLC-khez hasonlóan, akár központi egységként is működhet.A SPEL+ számos mozgási lehetőséget tartalmaz: PTP (point-to-point, azaz ponttól pontig mozgás), lineáris mozgás, CP (continuous path, vagyis folyamatos mozgás), stb., vagy speciális mozgásokat mint pl. a Jump (ugrás) vagy a Pallet (palettázás).
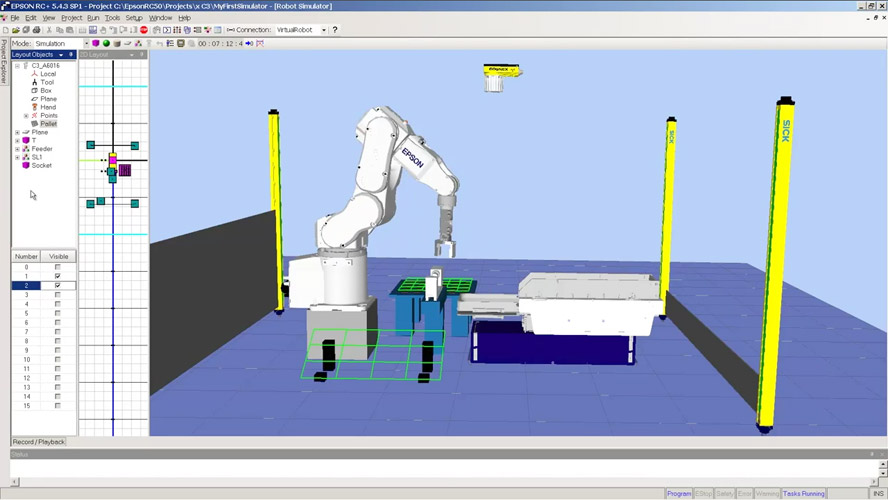
Az Epson RC+ környezet beépített szimulációs felületet tartalmaz. Ezen a felületen már a projekt kezdeti fázisban is megtervezheti a robotcelláját, megírhatja a programot. Az alkalmazás ciklusidejét még az előtt kipróbálhatja, mielőtt megérkezne a megrendelt robotja.




Az EPSON robotokkal szinte bármelyik gyártó kamerás rendszerét használhatja.
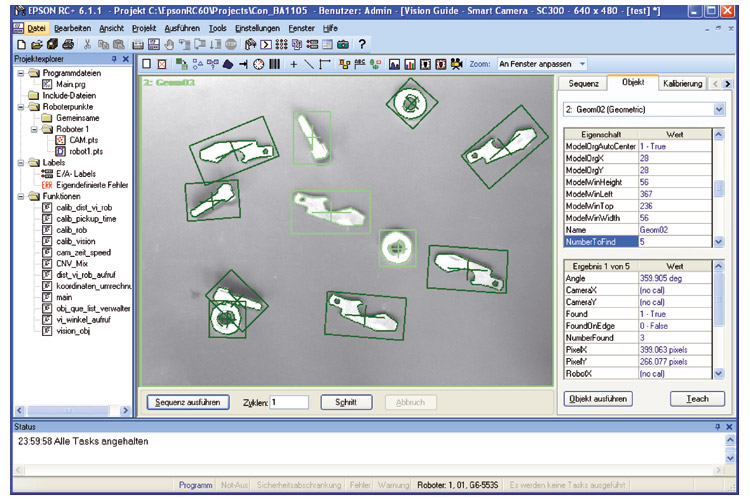
De az EPSON saját fejlesztésű kamerás megoldással is rendelkezik. A EPSON saját kamerás rendszerének előnye az,
hogy az kamerák az EPSON robotos környezeten belül programozhatóak (RC+). Az összes kiértékelt adat a robot
programjából azonnal elérhető.
Kétféle EPSON kamerás megoldásunk közül választhat.
Háromféle, ipari kivitelű kamerás központi feldolgozó egység közül választhat: CV2-LB, CV2-SB, CV2-HB.
A feldolgozó egység Ethernet hálózaton keresztül csatlakozik a robotvezérlőhöz. És ide csatlakozik az Ön által
kiválasztott GigE (gyorsabb) vagy USB (kedvezőbb árú) EPSON kamera is. A kamerák az EPSON RC+
környezetben programozhatóak.
Ha külső, Windows alapú ipari PC-t használ, akkor választhatja a PC Vision kamerás rendszerünket. A rendszer része a PC-be telepíthető kártya, amihez az EPSON kamerái is csatlakoznak. Ezzel a megoldással akár 8 db. nagy felbontású EPSON kamerát is használhat az alkalmazásában.
Az EPSON Vision kiegészítőkről bővebb információért kattintson ide.


Kapcsolat | Adatvédelem | Copyright © 2008 - 2025 Arizona Machinery Kft., Minden jog fenntartva.
{kind=link}